|
Belle II Software
release-06-01-15
|
|
Belle II Software
release-06-01-15
|
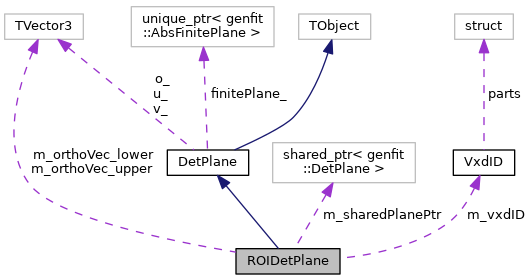
ROIDetPlane describes the plane containing a sensor. More...
#include <ROIDetPlane.h>
Public Member Functions | |
| ROIDetPlane (const VxdID &vxdID, double toleranceZ, double tolerancePhi) | |
| the constructor More... | |
| ROIDetPlane (const VxdID &vxdID) | |
| the constructor - needed for testbeam package | |
| VxdID | getVxdID () |
| return the sensor ID | |
| bool | isSensorInRange (const TVector3 &trackPosition, int layer) |
| determine if the sensor is in range | |
| void | setSharedPlanePtr (genfit::SharedPlanePtr spp) |
| assign the shared-plane pointer | |
| genfit::SharedPlanePtr | getSharedPlanePtr () |
| return the shared-plane pointer | |
| void | swap (DetPlane &other) |
| const TVector3 & | getO () const |
| const TVector3 & | getU () const |
| const TVector3 & | getV () const |
| void | set (const TVector3 &o, const TVector3 &u, const TVector3 &v) |
| void | setO (const TVector3 &o) |
| void | setO (double, double, double) |
| void | setU (const TVector3 &u) |
| void | setU (double, double, double) |
| void | setV (const TVector3 &v) |
| void | setV (double, double, double) |
| void | setUV (const TVector3 &u, const TVector3 &v) |
| void | setON (const TVector3 &o, const TVector3 &n) |
| void | setFinitePlane (AbsFinitePlane *finite) |
| Optionally, set the finite plane definition. More... | |
| TVector3 | getNormal () const |
| void | setNormal (const TVector3 &n) |
| void | setNormal (double, double, double) |
| void | setNormal (const double &theta, const double &phi) |
| TVector2 | project (const TVector3 &x) const |
| projecting a direction onto the plane: | |
| TVector2 | LabToPlane (const TVector3 &x) const |
| transform from Lab system into plane | |
| TVector3 | toLab (const TVector2 &x) const |
| transform from plane coordinates to lab system | |
| TVector3 | dist (const TVector3 &point) const |
| TVector2 | straightLineToPlane (const TVector3 &point, const TVector3 &dir) const |
| gives u,v coordinates of the intersection point of a straight line with plane | |
| void | straightLineToPlane (const double &posX, const double &posY, const double &posZ, const double &dirX, const double &dirY, const double &dirZ, double &u, double &v) const |
| gives u,v coordinates of the intersection point of a straight line with plane | |
| void | Print (const Option_t *="") const |
| double | distance (const TVector3 &point) const |
| absolute distance from a point to the plane | |
| double | distance (double, double, double) const |
| bool | isInActive (const TVector3 &point, const TVector3 &dir) const |
| intersect in the active area? C.f. AbsFinitePlane | |
| bool | isInActive (const double &posX, const double &posY, const double &posZ, const double &dirX, const double &dirY, const double &dirZ) const |
| intersect in the active area? C.f. AbsFinitePlane | |
| bool | isInActive (double u, double v) const |
| isInActive methods refer to finite plane. C.f. AbsFinitePlane | |
| bool | isInActive (const TVector2 &v) const |
| isInActive methods refer to finite plane. C.f. AbsFinitePlane | |
| bool | isFinite () const |
| void | rotate (double angle) |
| rotate u and v around normal. Angle is in rad. More for debugging than for actual use. | |
| void | reset () |
| delete finitePlane_ and set O, U, V to default values | |
Private Member Functions | |
| void | sane () |
| ensures orthonormal coordinates | |
Private Attributes | |
| VxdID | m_vxdID |
| the sensor ID | |
| TVector3 | m_orthoVec_upper |
| these two vectors define the planes going through the upper and lower edge of the sensor More... | |
| TVector3 | m_orthoVec_lower |
| vector normal to the vector from 0,0,0 to a point on the lower edge of the sensor in x-y-plane | |
| double | m_sensorZMin = 0 |
| min of allowed global z range | |
| double | m_sensorZMax = 0 |
| max of allowed global z range | |
| int | m_layer = 0 |
| layer number | |
| genfit::SharedPlanePtr | m_sharedPlanePtr |
| the shared plane pointer | |
| TVector3 | o_ |
| TVector3 | u_ |
| TVector3 | v_ |
| std::unique_ptr< AbsFinitePlane > | finitePlane_ |
ROIDetPlane describes the plane containing a sensor.
Definition at line 26 of file ROIDetPlane.h.
| ROIDetPlane | ( | const VxdID & | vxdID, |
| double | toleranceZ, | ||
| double | tolerancePhi | ||
| ) |
the constructor
< reference to sensor info in geometry
Definition at line 24 of file ROIDetPlane.cc.
|
inlineinherited |
Optionally, set the finite plane definition.
This is most important for avoiding fake intersection points in fitting of curlers. This should be implemented for silicon detectors most importantly.
Definition at line 103 of file DetPlane.h.
|
private |
these two vectors define the planes going through the upper and lower edge of the sensor
vector normal to the vector from 0,0,0 to a point on the upper edge of the sensor in x-y-plane
Definition at line 54 of file ROIDetPlane.h.