|
Belle II Software
release-08-01-10
|
|
Belle II Software
release-08-01-10
|
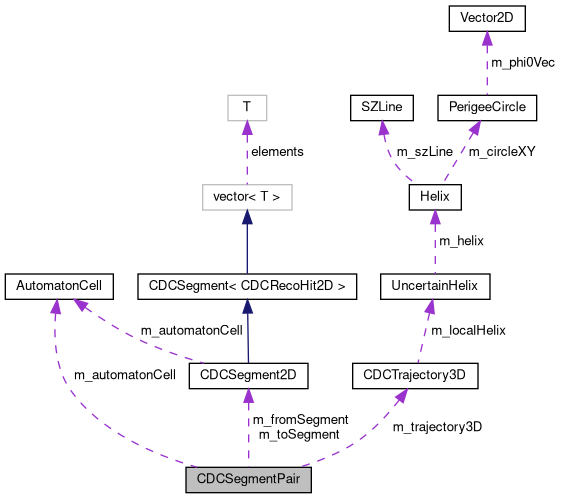
Class representing a pair of one reconstructed axial segement and one stereo segment in adjacent superlayer. More...
#include <CDCSegmentPair.h>
Public Member Functions | |
| CDCSegmentPair () | |
| Default constructor - for ROOT compatability. | |
| CDCSegmentPair (const CDCSegment2D *fromSegment, const CDCSegment2D *toSegment) | |
| Constructor from two segments. | |
| CDCSegmentPair (const CDCSegment2D *fromSegment, const CDCSegment2D *toSegment, const CDCTrajectory3D &trajectory3D) | |
| Constructor from two segments and an assoziated trajectory. | |
| bool | operator== (CDCSegmentPair const &rhs) const |
| Equality comparision based on the pointers to the stored segments. | |
| bool | operator< (CDCSegmentPair const &rhs) const |
| Total ordering sheme comparing the segment pointers. | |
| bool | checkSegmentsNonNullptr () const |
| Checks if both stored segments are not nullptr. Returns true if check is succeded. | |
| bool | checkSegmentsStereoKinds () const |
| Checks if the two segments are of different axial type. | |
| bool | checkSegments () const |
| Checks the references to the contained three segment for nullptrs and exactly one of them is axial and one is stereo. | |
| EStereoKind | getFromStereoKind () const |
| Getter for the stereo type of the first segment. | |
| EStereoKind | getToStereoKind () const |
| Getter for the stereo type of the second segment. | |
| ISuperLayer | getFromISuperLayer () const |
| Getter for the superlayer id of the from segment. | |
| ISuperLayer | getToISuperLayer () const |
| Getter for the superlayer id of the to segment. | |
| std::size_t | size () const |
| Getter for the total number of hits in this segment pair. | |
| const CDCSegment2D * | getFromSegment () const |
| Getter for the from segment. | |
| void | setFromSegment (const CDCSegment2D *fromSegment) |
| Setter for the from segment. | |
| const CDCSegment2D * | getToSegment () const |
| Getter for the to segment. | |
| void | setToSegment (const CDCSegment2D *toSegment) |
| Setter for the to segment. | |
| const CDCSegment2D * | getStereoSegment () const |
| Getter for the stereo segment. | |
| const CDCSegment2D * | getAxialSegment () const |
| Getter for the axial segment. | |
| void | setSegments (const CDCSegment2D *fromSegment, const CDCSegment2D *toSegment) |
| Setter for both segments simultaniously. | |
| double | computeDeltaPhiAtSuperLayerBound () const |
| Determines the angle between the last reconstructed position of the from segment and the first reconstructed position of the to segment. | |
| double | computeFromIsBeforeTo () const |
| Indicator if the from segment lies before the to segment. | |
| double | computeToIsAfterFrom () const |
| Indicator if the from segment lies before the to segment. | |
| double | computeIsCoaligned () const |
| Indicator if the from segment and the to segment have roughly the same travel direction. | |
| double | computeFromIsBeforeToFitless () const |
| Indicator if the from segment lies before the to segment, build without using the trajectories, which may not have been fitted yet. | |
| double | computeToIsAfterFromFitless () const |
| Indicator if the from segment lies before the to segment, build without using the trajectories, which may not have been fitted yet. | |
| double | computeIsCoalignedFitless () const |
| Indicator if the from segment and the to segment have roughly the same travel direction without using the common fit. | |
| EForwardBackward | isCoaligned (const CDCTrajectory2D &trajectory2D) const |
| Checks if the last entity in the vector lies greater or lower travel distance than the last entity. More... | |
| void | setTrajectory3D (const CDCTrajectory3D &trajectory3D) const |
| Setter for the three dimensional trajectory. | |
| CDCTrajectory3D & | getTrajectory3D () const |
| Getter for the three dimensional trajectory. | |
| CDCTrajectory2D | getTrajectory2D () const |
| Getter for the two dimensional projection of the common three dimensional trajectory. | |
| CDCTrajectorySZ | getTrajectorySZ () const |
| Getter for the sz projection of the common three dimensional trajectory. | |
| void | clearTrajectory3D () const |
| Invalides the currently stored trajectory information. | |
| void | unsetAndForwardMaskedFlag () const |
| Unsets the masked flag of the segment triple's automaton cell and of the three contained segments. | |
| void | setAndForwardMaskedFlag () const |
| Sets the masked flag of the segment triple's automaton cell and of the three contained segments. | |
| void | receiveMaskedFlag () const |
| If one of the contained segments is marked as masked this segment triple is set be masked as well. | |
| AutomatonCell & | getAutomatonCell () const |
| Mutable getter for the automaton cell. | |
Private Attributes | |
| const CDCSegment2D * | m_fromSegment |
| Reference to the from segment. | |
| const CDCSegment2D * | m_toSegment |
| Reference to the to segment. | |
| CDCTrajectory3D | m_trajectory3D |
| Memory for the common three dimensional trajectory. | |
| AutomatonCell | m_automatonCell |
| Automaton cell assoziated with the pair of segments. | |
Friends | |
| bool | operator< (const CDCSegmentPair &segmentPair, const CDCSegment2D *segment) |
| Define reconstructed segments and axial stereo segment pairs as coaligned on the from segment. | |
| bool | operator< (const CDCSegment2D *segment, const CDCSegmentPair &segmentPair) |
| Define reconstructed segments and axial stereo segment pairs as coaligned on the from segment. | |
Class representing a pair of one reconstructed axial segement and one stereo segment in adjacent superlayer.
Definition at line 34 of file CDCSegmentPair.h.
| EForwardBackward isCoaligned | ( | const CDCTrajectory2D & | trajectory2D | ) | const |
Checks if the last entity in the vector lies greater or lower travel distance than the last entity.
Returns:
Definition at line 263 of file CDCSegmentPair.cc.