|
Belle II Software
release-08-01-10
|
|
Belle II Software
release-08-01-10
|
Simple Kalman filter implementation. More...
#include <KalmanFitter.h>
Public Member Functions | |
| KalmanFitter (unsigned int maxIterations=4, double deltaPval=1e-3, double blowUpFactor=1e3, bool squareRootFormalism=false) | |
| void | processTrackWithRep (Track *tr, const AbsTrackRep *rep, bool resortHits=false) override |
| Hit resorting currently NOT supported. | |
| void | processTrackPartially (Track *tr, const AbsTrackRep *rep, int startId=0, int endId=-1) |
| process only a part of the track. More... | |
| void | useSquareRootFormalism (bool squareRootFormalism=true) |
| void | getChiSquNdf (const Track *tr, const AbsTrackRep *rep, double &bChi2, double &fChi2, double &bNdf, double &fNdf) const |
| double | getChiSqu (const Track *tr, const AbsTrackRep *rep, int direction=-1) const |
| double | getNdf (const Track *tr, const AbsTrackRep *rep, int direction=-1) const |
| double | getRedChiSqu (const Track *tr, const AbsTrackRep *rep, int direction=-1) const |
| double | getPVal (const Track *tr, const AbsTrackRep *rep, int direction=-1) const |
| unsigned int | getMinIterations () const |
| unsigned int | getMaxIterations () const |
| double | getDeltaPval () const |
| double | getRelChi2Change () const |
| double | getBlowUpFactor () const |
| bool | getResetOffDiagonals () const |
| double | getBlowUpMaxVal () const |
| eMultipleMeasurementHandling | getMultipleMeasurementHandling () const |
| int | getMaxFailedHits () const |
| virtual void | setMinIterations (unsigned int n) |
| Set the minimum number of iterations. | |
| virtual void | setMaxIterations (unsigned int n) |
| Set the maximum number of iterations. | |
| void | setDeltaPval (double deltaPval) |
| Set Convergence criterion. More... | |
| void | setRelChi2Change (double relChi2Change) |
| @ brief Set Non-convergence criterion More... | |
| void | setBlowUpFactor (double blowUpFactor) |
| void | setResetOffDiagonals (bool resetOffDiagonals) |
| void | setBlowUpMaxVal (double blowUpMaxVal) |
| Limit the cov entries to this maximum value when blowing up the cov. Set to negative value to disable. Default is 1.E6. More... | |
| void | setMultipleMeasurementHandling (eMultipleMeasurementHandling mmh) |
| How should multiple measurements be handled? | |
| virtual void | setMaxFailedHits (int val) |
| bool | isTrackPrepared (const Track *tr, const AbsTrackRep *rep) const |
| bool | isTrackFitted (const Track *tr, const AbsTrackRep *rep) const |
| bool | canIgnoreWeights () const |
| returns if the fitter can ignore the weights and handle the MeasurementOnPlanes as if they had weight 1. | |
| void | processTrack (Track *, bool resortHits=false) |
| Process all reps. More... | |
| virtual void | setDebugLvl (unsigned int lvl=1) |
Protected Member Functions | |
| const std::vector< MeasurementOnPlane * > | getMeasurements (const KalmanFitterInfo *fi, const TrackPoint *tp, int direction) const |
| get the measurementsOnPlane taking the multipleMeasurementHandling_ into account | |
Protected Attributes | |
| unsigned int | minIterations_ |
| Minimum number of iterations to attempt. Forward and backward are counted as one iteration. | |
| unsigned int | maxIterations_ |
| Maximum number of iterations to attempt. Forward and backward are counted as one iteration. | |
| double | deltaPval_ |
| Convergence criterion. More... | |
| double | relChi2Change_ |
| @ brief Non-convergence criterion More... | |
| double | blowUpFactor_ |
| Blow up the covariance of the forward (backward) fit by this factor before seeding the backward (forward) fit. | |
| bool | resetOffDiagonals_ |
| Reset the off-diagonals to 0 when blowing up the cov. | |
| double | blowUpMaxVal_ |
| Limit the cov entries to this maxuimum value when blowing up the cov. | |
| eMultipleMeasurementHandling | multipleMeasurementHandling_ |
| How to handle if there are multiple MeasurementsOnPlane. | |
| int | maxFailedHits_ |
| after how many failed hits (exception during construction of plane, extrapolation etc.) should the fit be cancelled. More... | |
| unsigned int | debugLvl_ |
Private Member Functions | |
| KalmanFitter (const KalmanFitter &) | |
| KalmanFitter & | operator= (KalmanFitter const &) |
| bool | fitTrack (Track *tr, const AbsTrackRep *rep, double &chi2, double &ndf, int startId, int endId, int &nFailedHits) |
| void | processTrackPoint (TrackPoint *tp, const AbsTrackRep *rep, double &chi2, double &ndf, int direction) |
Private Attributes | |
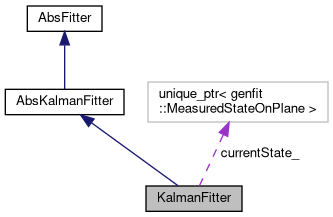
| std::unique_ptr< MeasuredStateOnPlane > | currentState_ |
| bool | squareRootFormalism_ |
Simple Kalman filter implementation.
Definition at line 40 of file KalmanFitter.h.
|
inherited |
Process all reps.
Start with the cardinalRep and resort the hits if necessary (and supported by the fitter)
Definition at line 25 of file AbsFitter.cc.
| void processTrackPartially | ( | Track * | tr, |
| const AbsTrackRep * | rep, | ||
| int | startId = 0, |
||
| int | endId = -1 |
||
| ) |
process only a part of the track.
Can also be used to process the track only in backward direction. Does not alter the FitStatus and does not do multiple iterations.
Definition at line 304 of file KalmanFitter.cc.
|
inlineinherited |
Limit the cov entries to this maximum value when blowing up the cov. Set to negative value to disable. Default is 1.E6.
This is especially useful for fits where the measurements do not constrain one direction, e.g. parallel wire measurements. The fit will not be constrained along the wire direction. This also means that the covariance along the wire direction will not get smaller during the fit. However, it will be blown up before the next iteration, leading to an exponential growth of the covariance element(s) corresponding to the wire direction. This can then lead to numerical problems. To prevent this, the maximum value of the covariance elements after blowing up can be limited.
Definition at line 119 of file AbsKalmanFitter.h.
|
inlineinherited |
Set Convergence criterion.
if track total P-value changes less than this between consecutive iterations, consider the track converged. chi² from the backwards fit is used.
Definition at line 95 of file AbsKalmanFitter.h.
|
inlineinherited |
@ brief Set Non-convergence criterion
if the relative chi^2 between two iterations is larger than relChi2Change_, the fit is NOT converged and further iterations will be done, even if the deltaPval_ convergence criterium is met. This is especially useful for fits which have a p-value of almost 0 (possibly due to bad start values), where the p-value from one iteration to the next might not change much. However, a significant change in chi^2 tells us, that the fit might not yet be converged.
Definition at line 106 of file AbsKalmanFitter.h.
|
protectedinherited |
Convergence criterion.
if track total P-value changes less than this between consecutive iterations, consider the track converged. chi² from the backwards fit is used.
Definition at line 148 of file AbsKalmanFitter.h.
|
protectedinherited |
after how many failed hits (exception during construction of plane, extrapolation etc.) should the fit be cancelled.
-1 means don't cancel
Definition at line 172 of file AbsKalmanFitter.h.
|
protectedinherited |
@ brief Non-convergence criterion
if the relative chi^2 between two iterations is larger than relChi2Change_, the fit is NOT converged and further iterations will be done, even if the deltaPval_ convergence criterium is met. This is especially useful for fits which have a p-value of almost 0 (possibly due to bad start values), where the p-value from one iteration to the next might not change much. However, a significant change in chi^2 tells us, that the fit might not yet be converged.
Definition at line 158 of file AbsKalmanFitter.h.