|
Belle II Software
release-08-01-10
|
|
Belle II Software
release-08-01-10
|
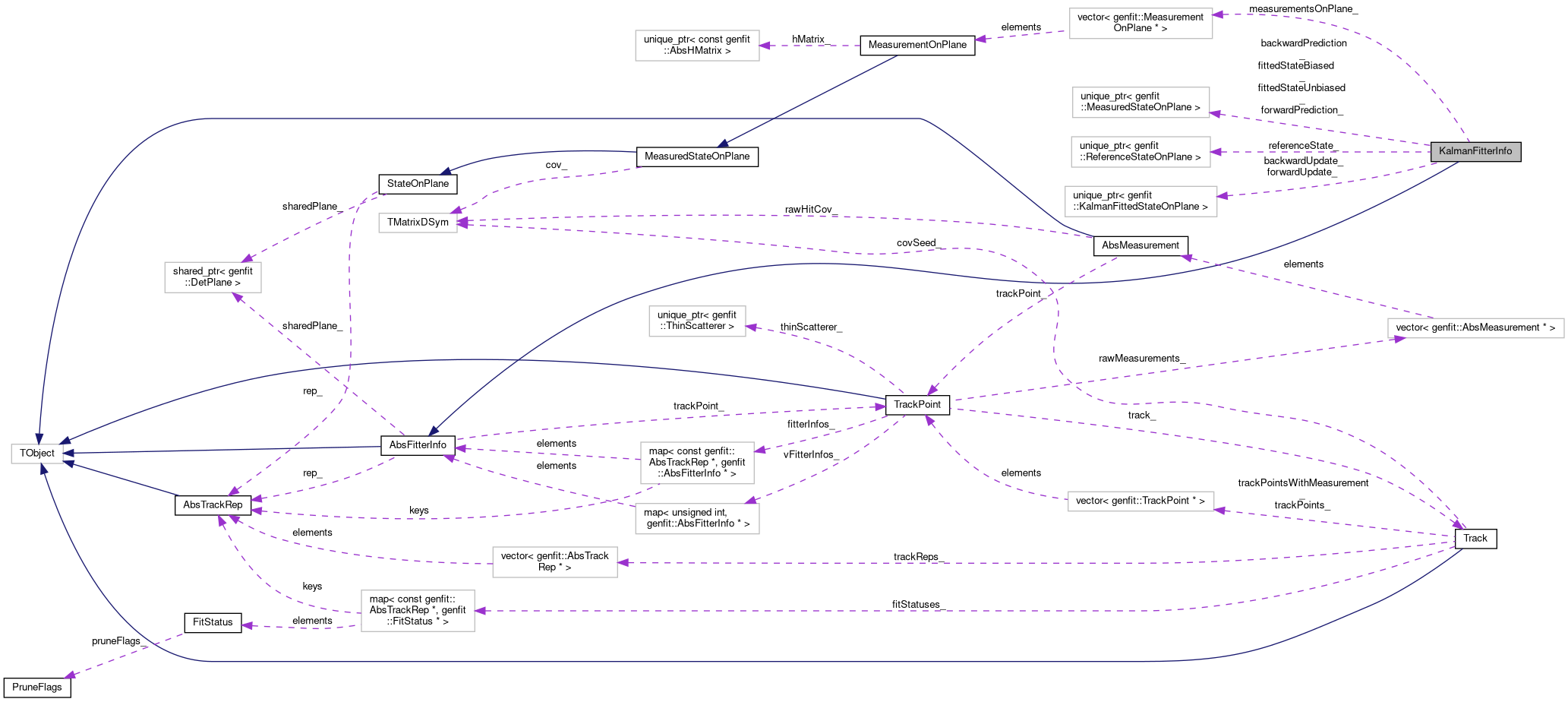
Collects information needed and produced by a AbsKalmanFitter implementations and is specific to one AbsTrackRep of the Track. More...
#include <KalmanFitterInfo.h>
Public Member Functions | |
| KalmanFitterInfo (const TrackPoint *trackPoint, const AbsTrackRep *rep) | |
| virtual KalmanFitterInfo * | clone () const override |
| Deep copy ctor for polymorphic class. | |
| ReferenceStateOnPlane * | getReferenceState () const |
| MeasuredStateOnPlane * | getForwardPrediction () const |
| MeasuredStateOnPlane * | getBackwardPrediction () const |
| MeasuredStateOnPlane * | getPrediction (int direction) const |
| KalmanFittedStateOnPlane * | getForwardUpdate () const |
| KalmanFittedStateOnPlane * | getBackwardUpdate () const |
| KalmanFittedStateOnPlane * | getUpdate (int direction) const |
| const std::vector< genfit::MeasurementOnPlane * > & | getMeasurementsOnPlane () const |
| MeasurementOnPlane * | getMeasurementOnPlane (int i=0) const |
| MeasurementOnPlane | getAvgWeightedMeasurementOnPlane (bool ignoreWeights=false) const |
| Get weighted mean of all measurements. More... | |
| MeasurementOnPlane * | getClosestMeasurementOnPlane (const StateOnPlane *) const |
| Get measurements which is closest to state. | |
| unsigned int | getNumMeasurements () const |
| std::vector< double > | getWeights () const |
| Get weights of measurements. | |
| bool | areWeightsFixed () const |
| Are the weights fixed? | |
| const MeasuredStateOnPlane & | getFittedState (bool biased=true) const override |
| Get unbiased or biased (default) smoothed state. | |
| MeasurementOnPlane | getResidual (unsigned int iMeasurement=0, bool biased=false, bool onlyMeasurementErrors=true) const override |
| Get unbiased (default) or biased residual from ith measurement. | |
| double | getSmoothedChi2 (unsigned int iMeasurement=0) const |
| bool | hasMeasurements () const override |
| bool | hasReferenceState () const override |
| bool | hasForwardPrediction () const override |
| bool | hasBackwardPrediction () const override |
| bool | hasForwardUpdate () const override |
| bool | hasBackwardUpdate () const override |
| bool | hasUpdate (int direction) const override |
| bool | hasPredictionsAndUpdates () const |
| void | setReferenceState (ReferenceStateOnPlane *referenceState) |
| void | setForwardPrediction (MeasuredStateOnPlane *forwardPrediction) |
| void | setBackwardPrediction (MeasuredStateOnPlane *backwardPrediction) |
| void | setPrediction (MeasuredStateOnPlane *prediction, int direction) |
| void | setForwardUpdate (KalmanFittedStateOnPlane *forwardUpdate) |
| void | setBackwardUpdate (KalmanFittedStateOnPlane *backwardUpdate) |
| void | setUpdate (KalmanFittedStateOnPlane *update, int direction) |
| void | setMeasurementsOnPlane (const std::vector< genfit::MeasurementOnPlane * > &measurementsOnPlane) |
| void | addMeasurementOnPlane (MeasurementOnPlane *measurementOnPlane) |
| void | addMeasurementsOnPlane (const std::vector< genfit::MeasurementOnPlane * > &measurementsOnPlane) |
| void | setWeights (const std::vector< double > &) |
| Set weights of measurements. | |
| void | fixWeights (bool arg=true) |
| void | setRep (const AbsTrackRep *rep) override |
| void | deleteForwardInfo () override |
| void | deleteBackwardInfo () override |
| void | deletePredictions () |
| void | deleteReferenceInfo () override |
| void | deleteMeasurementInfo () override |
| virtual void | Print (const Option_t *="") const override |
| virtual bool | checkConsistency (const genfit::PruneFlags *=nullptr) const override |
| const TrackPoint * | getTrackPoint () const |
| const AbsTrackRep * | getRep () const |
| void | setTrackPoint (const TrackPoint *tp) |
| virtual bool | hasPrediction (int direction) const |
| const SharedPlanePtr & | getPlane () const |
| void | setPlane (const SharedPlanePtr &plane) |
Protected Attributes | |
| const TrackPoint * | trackPoint_ |
| Pointer to TrackPoint where the FitterInfo belongs to. | |
| const AbsTrackRep * | rep_ |
| No ownership. More... | |
| SharedPlanePtr | sharedPlane_ |
| No ownership. | |
Private Attributes | |
| std::unique_ptr< ReferenceStateOnPlane > | referenceState_ |
| Reference state. Used by KalmanFitterRefTrack. | |
| std::unique_ptr< MeasuredStateOnPlane > | forwardPrediction_ |
| std::unique_ptr< KalmanFittedStateOnPlane > | forwardUpdate_ |
| std::unique_ptr< MeasuredStateOnPlane > | backwardPrediction_ |
| std::unique_ptr< KalmanFittedStateOnPlane > | backwardUpdate_ |
| std::unique_ptr< MeasuredStateOnPlane > | fittedStateUnbiased_ |
| std::unique_ptr< MeasuredStateOnPlane > | fittedStateBiased_ |
| cache | |
| std::vector< MeasurementOnPlane * > | measurementsOnPlane_ |
| cache | |
| bool | fixWeights_ |
Collects information needed and produced by a AbsKalmanFitter implementations and is specific to one AbsTrackRep of the Track.
Definition at line 44 of file KalmanFitterInfo.h.
| MeasurementOnPlane getAvgWeightedMeasurementOnPlane | ( | bool | ignoreWeights = false | ) | const |
Get weighted mean of all measurements.
| ignoreWeights | If set, the weights of the individual measurements will be ignored (they will be treated as if they all had weight 1) |
Definition at line 78 of file KalmanFitterInfo.cc.
|
protectedinherited |
No ownership.
Pointer to AbsTrackRep with respect to which the FitterInfo is defined
Definition at line 92 of file AbsFitterInfo.h.