|
Belle II Software development
|
|
Belle II Software development
|
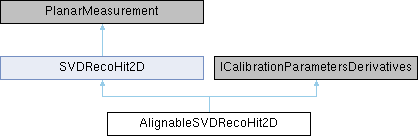
This class is used to transfer SVD information to the track fit. More...
#include <AlignableSVDRecoHit2D.h>
Public Member Functions | |
| ~AlignableSVDRecoHit2D () override | |
| Destructor. | |
| genfit::AbsMeasurement * | clone () const override |
| Creating a deep copy of this hit. | |
| virtual std::pair< std::vector< int >, TMatrixD > | globalDerivatives (const genfit::StateOnPlane *sop) override |
| Labels and derivatives of residuals (local measurement coordinates) w.r.t. | |
| SVDRecoHit2D (const SVDTrueHit *hit, const genfit::TrackCandHit *trackCandHit=nullptr, float sigmaU=-1, float sigmaV=-1) | |
| Inherit constructors. | |
| SVDRecoHit2D (VxdID::baseType vxdid, const double u, const double v, double sigmaU=-1, double sigmaV=-1) | |
| Inherit constructors. | |
| SVDRecoHit2D (const SVDCluster &uHit, const SVDCluster &vHit) | |
| Inherit constructors. | |
| SVDRecoHit2D (const SVDRecoHit &uRecoHit, const SVDRecoHit &vRecoHit) | |
| Inherit constructors. | |
| VxdID | getSensorID () const |
| Get the compact ID. | |
| const SVDTrueHit * | getTrueHit () const |
| Get pointer to the TrueHit used when creating this RecoHit, can be nullptr if created from something else. | |
| const SVDCluster * | getUCluster () const |
| Get pointer to the u cluster used to create this RecoHit. | |
| const SVDCluster * | getVCluster () const |
| Get pointer to the u cluster used to create this RecoHit. | |
| float | getU () const |
| Get u coordinate. | |
| float | getV () const |
| Get v coordinate. | |
| float | getUVariance () const |
| Get u coordinate variance. | |
| float | getVVariance () const |
| Get v coordinate variance. | |
| float | getUVCov () const |
| Get u-v error covariance. | |
| float | getEnergyDep () const |
| Get deposited energy. | |
| virtual std::vector< genfit::MeasurementOnPlane * > | constructMeasurementsOnPlane (const genfit::StateOnPlane &state) const override |
| Get deposited energy error. | |
Static Public Attributes | |
| static bool | s_enableLorentzGlobalDerivatives = false |
| Static enabling(true) or disabling(false) addition of global derivatives for Lorentz shift. | |
Private Types | |
| enum | { HIT_DIMENSIONS = 2 } |
Private Member Functions | |
| ClassDefOverride (AlignableSVDRecoHit2D, 5) | |
| ROOT Macro. | |
| void | setDetectorPlane () |
| Set up Detector plane information. | |
| TVectorD | applyPlanarDeformation (TVectorD rawHit, std::vector< double > planarParameters, const genfit::StateOnPlane &state) const |
| Apply planar deformation of sensors. | |
Private Attributes | |
| const SVDTrueHit * | m_trueHit |
| Pointer to the Truehit used to generate this hit. | |
| const SVDCluster * | m_uCluster |
| Pointer to mother uCluster. | |
| const SVDCluster * | m_vCluster |
| Pointer to mother vCluster. | |
| float | m_energyDep |
| deposited energy. | |
| unsigned short | m_sensorID |
| Unique sensor identifier. | |
Friends | |
| class | SVDRecoHit2D |
This class is used to transfer SVD information to the track fit.
Definition at line 28 of file AlignableSVDRecoHit2D.h.
|
privateinherited |
| Enumerator | |
|---|---|
| HIT_DIMENSIONS | sensitive Dimensions of the Hit |
Definition at line 133 of file SVDRecoHit2D.h.
|
inlineoverride |
|
privateinherited |
Apply planar deformation of sensors.
Definition at line 173 of file SVDRecoHit2D.cc.
|
inlineoverride |
Creating a deep copy of this hit.
Definition at line 41 of file AlignableSVDRecoHit2D.h.
|
overridevirtualinherited |
Get deposited energy error.
Methods that actually interface to Genfit.
Definition at line 216 of file SVDRecoHit2D.cc.
|
inlineinherited |
|
inlineinherited |
|
inlineinherited |
Get pointer to the TrueHit used when creating this RecoHit, can be nullptr if created from something else.
Definition at line 103 of file SVDRecoHit2D.h.
|
inlineinherited |
|
inlineinherited |
Get pointer to the u cluster used to create this RecoHit.
Definition at line 105 of file SVDRecoHit2D.h.
|
inlineinherited |
Get u coordinate variance.
Definition at line 115 of file SVDRecoHit2D.h.
|
inlineinherited |
Get u-v error covariance.
Definition at line 119 of file SVDRecoHit2D.h.
|
inlineinherited |
|
inlineinherited |
Get pointer to the u cluster used to create this RecoHit.
Definition at line 107 of file SVDRecoHit2D.h.
|
inlineinherited |
Get v coordinate variance.
Definition at line 117 of file SVDRecoHit2D.h.
|
overridevirtual |
Labels and derivatives of residuals (local measurement coordinates) w.r.t.
alignment/calibration parameters Matrix "G" of derivatives valid for given prediction of track state:
G(i, j) = d_residual_i/d_parameter_j
For 2D measurement (u,v):
G = ( du/da du/db du/dc ... ) ( dv/da dv/db dv/dc ... )
for calibration parameters a, b, c.
For 1D measurement:
G = ( 0 0 0 ... ) ( dv/da dv/db dv/dc ... ) for V-strip,
G = ( du/da du/db du/dc ... ) ( 0 0 0 ... ) for U-strip,
Measurements with more dimensions (slopes, curvature) should provide full 4-5Dx(n params) matrix (state as (q/p, u', v', u, v) or (u', v', u, v))
| sop | Predicted state of the track as linearization point around which derivatives of alignment/calibration parameters shall be computed |
Definition at line 25 of file AlignableSVDRecoHit2D.cc.
|
privateinherited |
Set up Detector plane information.
Definition at line 157 of file SVDRecoHit2D.cc.
| SVDRecoHit2D | ( | const SVDCluster & | uHit, |
| const SVDCluster & | vHit ) |
Inherit constructors.
Definition at line 83 of file SVDRecoHit2D.cc.
| SVDRecoHit2D | ( | const SVDRecoHit & | uRecoHit, |
| const SVDRecoHit & | vRecoHit ) |
Inherit constructors.
Definition at line 89 of file SVDRecoHit2D.cc.
|
explicit |
Inherit constructors.
Definition at line 64 of file SVDRecoHit2D.cc.
| SVDRecoHit2D | ( | VxdID::baseType | vxdid, |
| const double | u, | ||
| const double | v, | ||
| double | sigmaU = -1, | ||
| double | sigmaV = -1 ) |
Inherit constructors.
Definition at line 77 of file SVDRecoHit2D.cc.
|
friend |
Definition at line 29 of file AlignableSVDRecoHit2D.h.
|
privateinherited |
deposited energy.
Definition at line 139 of file SVDRecoHit2D.h.
|
privateinherited |
Unique sensor identifier.
Definition at line 141 of file SVDRecoHit2D.h.
|
privateinherited |
Pointer to the Truehit used to generate this hit.
Definition at line 135 of file SVDRecoHit2D.h.
|
privateinherited |
Pointer to mother uCluster.
Definition at line 136 of file SVDRecoHit2D.h.
|
privateinherited |
Pointer to mother vCluster.
Definition at line 137 of file SVDRecoHit2D.h.
|
static |
Static enabling(true) or disabling(false) addition of global derivatives for Lorentz shift.
Definition at line 32 of file AlignableSVDRecoHit2D.h.