|
Belle II Software development
|
|
Belle II Software development
|
Fixes the orientation of segments by a simple heuristic. More...
#include <SegmentOrienter.h>
Public Types | |
| using | IOTypes |
| Types that should be served to apply on invocation. | |
| using | IOTypes |
| Types that should be served to apply on invocation. | |
| using | IOVectors |
| Vector types that should be served to apply on invocation. | |
| using | IOVectors |
| Vector types that should be served to apply on invocation. | |
Public Member Functions | |
| std::string | getDescription () final |
| Short description of the findlet. | |
| void | exposeParameters (ModuleParamList *moduleParamList, const std::string &prefix) final |
| Expose the parameters to a module. | |
| void | initialize () final |
| Signals the beginning of the event processing. | |
| void | apply (const std::vector< TrackingUtilities::CDCSegment2D > &inputSegments, std::vector< TrackingUtilities::CDCSegment2D > &outputSegments) final |
| Main algorithm applying the adjustment of the orientation. | |
| virtual void | apply (ToVector< AIOTypes > &... ioVectors)=0 |
| Main function executing the algorithm. | |
| void | beginRun () override |
| Receive and dispatch signal for the beginning of a new run. | |
| void | beginEvent () override |
| Receive and dispatch signal for the start of a new event. | |
| void | endRun () override |
| Receive and dispatch signal for the end of the run. | |
| void | terminate () override |
| Receive and dispatch Signal for termination of the event processing. | |
Protected Types | |
| using | ToVector |
| Short hand for ToRangeImpl. | |
| using | ToVector |
| Short hand for ToRangeImpl. | |
Protected Member Functions | |
| void | addProcessingSignalListener (ProcessingSignalListener *psl) |
| Register a processing signal listener to be notified. | |
| int | getNProcessingSignalListener () |
| Get the number of currently registered listeners. | |
Private Types | |
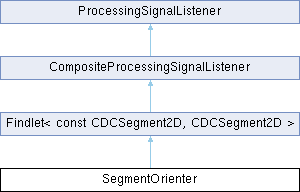
| using | Super = TrackingUtilities::Findlet<const TrackingUtilities::CDCSegment2D, TrackingUtilities::CDCSegment2D> |
| Type of the base class. | |
Private Attributes | |
| std::string | m_param_segmentOrientationString = "" |
| Parameter: String that states the desired segment orientation. | |
| EPreferredDirection | m_segmentOrientation = EPreferredDirection::c_None |
| Encoded desired segment orientation. | |
| std::vector< ProcessingSignalListener * > | m_subordinaryProcessingSignalListeners |
| References to subordinary signal processing listener contained in this findlet. | |
| bool | m_initialized |
| Flag to keep track whether initialization happened before. | |
| bool | m_terminated |
| Flag to keep track whether termination happened before. | |
| std::string | m_initializedAs |
| Name of the type during initialisation. | |
Fixes the orientation of segments by a simple heuristic.
Definition at line 29 of file SegmentOrienter.h.
|
inherited |
|
inherited |
|
inherited |
|
inherited |
|
private |
Type of the base class.
Definition at line 33 of file SegmentOrienter.h.
|
protectedinherited |
|
protectedinherited |
|
protectedinherited |
Register a processing signal listener to be notified.
Definition at line 53 of file CompositeProcessingSignalListener.cc.
|
final |
Main algorithm applying the adjustment of the orientation.
Copy segments to output fixing their orientation
Definition at line 53 of file SegmentOrienter.cc.
|
overrideinherited |
Receive and dispatch signal for the start of a new event.
Definition at line 36 of file CompositeProcessingSignalListener.cc.
|
overrideinherited |
Receive and dispatch signal for the beginning of a new run.
Definition at line 33 of file CompositeProcessingSignalListener.cc.
|
overrideinherited |
Receive and dispatch signal for the end of the run.
Definition at line 39 of file CompositeProcessingSignalListener.cc.
|
finalvirtual |
Expose the parameters to a module.
Reimplemented from CompositeProcessingSignalListener.
Definition at line 27 of file SegmentOrienter.cc.
|
finalvirtual |
Short description of the findlet.
Reimplemented from Findlet< const TrackingUtilities::CDCSegment2D, TrackingUtilities::CDCSegment2D >.
Definition at line 21 of file SegmentOrienter.cc.
|
protectedinherited |
Get the number of currently registered listeners.
Definition at line 56 of file CompositeProcessingSignalListener.cc.
|
finalvirtual |
Signals the beginning of the event processing.
Reimplemented from CompositeProcessingSignalListener.
Definition at line 41 of file SegmentOrienter.cc.
|
overrideinherited |
Receive and dispatch Signal for termination of the event processing.
Definition at line 42 of file CompositeProcessingSignalListener.cc.
|
privateinherited |
Flag to keep track whether initialization happened before.
Definition at line 52 of file ProcessingSignalListener.h.
|
privateinherited |
Name of the type during initialisation.
Definition at line 58 of file ProcessingSignalListener.h.
|
private |
Parameter: String that states the desired segment orientation.
Valid orientations are "none" (unchanged), "outwards", "downwards", "symmetric", "curling"
Definition at line 54 of file SegmentOrienter.h.
|
private |
Encoded desired segment orientation.
Valid orientations are "c_None" (unchanged), "c_Outwards", "c_Downwards", "c_Symmetric", "c_Curling",
Definition at line 60 of file SegmentOrienter.h.
|
privateinherited |
References to subordinary signal processing listener contained in this findlet.
Definition at line 60 of file CompositeProcessingSignalListener.h.
|
privateinherited |
Flag to keep track whether termination happened before.
Definition at line 55 of file ProcessingSignalListener.h.