|
Belle II Software development
|
|
Belle II Software development
|
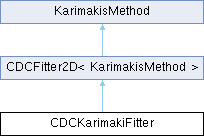
Class implementing the fitter using Karimakis method. More...
#include <CDCKarimakiFitter.h>
Public Member Functions | |
| CDCKarimakiFitter () | |
| Default constructor. | |
| ~CDCKarimakiFitter () | |
| Default destructor. | |
| TrackingUtilities::CDCTrajectory2D | fit (const CDCObservations2D &observations2D) const |
| Fits a collection of observation drift circles. | |
| TrackingUtilities::CDCTrajectory2D | fit (CDCObservations2D &&observations2D) const |
| Fits a collection of observation drift circles. | |
| TrackingUtilities::CDCTrajectory2D | fit (const TrackingUtilities::CDCTrack &track) const |
| Fits the track. | |
| TrackingUtilities::CDCTrajectory2D | fit (const TrackingUtilities::CDCSegment3D &segment) const |
| Fits the segment. | |
| TrackingUtilities::CDCTrajectory2D | fit (const TrackingUtilities::CDCSegment2D &fromSegment, const TrackingUtilities::CDCSegment2D &toSegment) const |
| Fits to the two segments. | |
| TrackingUtilities::CDCTrajectory2D | fit (const TrackingUtilities::CDCSegment2D &segment) const |
| Fits the segment. | |
| TrackingUtilities::CDCTrajectory2D | fit (const std::vector< const TrackingUtilities::CDCWireHit * > &wireHit) const |
| Fits to the wire hit observations. | |
| TrackingUtilities::CDCTrajectory2D | fit (const std::vector< const CDC::CDCWire * > &wires) const |
| Fits to the wire positions. Explicit specialisation to be used from python. | |
| TrackingUtilities::CDCTrajectory2D | fit (const TrackingUtilities::CDCWireHitSegment &wireHits) const |
| Fits to the wire positions. Explicit specialisation to be used from python. | |
| void | update (TrackingUtilities::CDCTrajectory2D &trajectory2D, const CDCObservations2D &observations2D) const |
| Update the trajectory with a fit to the observations. | |
| void | update (TrackingUtilities::CDCTrajectory2D &trajectory2D, CDCObservations2D &&observations2D) const |
| Update the trajectory with a fit to the observations. | |
| void | update (TrackingUtilities::CDCTrajectory2D &trajectory2D, const TrackingUtilities::CDCSegment2D &segment) const |
| Updates the given trajectory inplace from the given segment. | |
| void | update (TrackingUtilities::CDCTrajectory2D &trajectory2D, const TrackingUtilities::CDCAxialSegmentPair &axialSegmentPair) const |
| Updates the given trajectory inplace from the given segment pair. | |
| void | update (TrackingUtilities::CDCTrajectory2D &trajectory2D, CDCObservations2D &observations2D) const |
| Executes the fit and updates the trajectory parameters. This may render the information in the observation object. | |
| void | useOnlyPosition () |
| Setup the fitter to use only the reconstructed positions of the hits. | |
| void | useOnlyOrientation () |
| Setup the fitter to use only reference position and the drift length with right left orientation. | |
| void | usePositionAndOrientation () |
| Setup the fitter to use both the reconstructed position and the reference position and the drift length with right left orientation. | |
| void | setFitVariance (EFitVariance fitVariance) |
| Setup the fitter to use the given variance measure by default. | |
| bool | isLineConstrained () const |
| Getter for the indicator that lines should be fitted by this fitter. | |
| void | setLineConstrained (bool constrained=true) |
| Indicator if this fitter is setup to fit lines. | |
Static Public Member Functions | |
| static const CDCKarimakiFitter & | getFitter () |
| Static getter for a general fitter instance with Karimakis method. | |
| static const CDCKarimakiFitter & | getLineFitter () |
| Static getter for a line fitter. | |
| static const CDCKarimakiFitter & | getNoDriftVarianceFitter () |
| Static getter for a general fitter that does not use the drift length variances. | |
Private Member Functions | |
| TrackingUtilities::CDCTrajectory2D | fitGeneric (const AHits &hits) const |
| Fits a collection of hit typs which are convertible to observation circles. | |
| TrackingUtilities::CDCTrajectory2D | fitGeneric (const AStartHits &startHits, const AEndHits &endHits) const |
| Fits together two collections of hit types which are convertible to observation circles. | |
| void | updateGeneric (TrackingUtilities::CDCTrajectory2D &trajectory2D, const AHits &hits) const |
| Updates a given trajectory with a fit to a collection of hits types, which are convertible to observation circles. | |
| void | updateGeneric (TrackingUtilities::CDCTrajectory2D &trajectory2D, const AStartHits &startHits, const AEndHits &endHits) const |
| Updates a given trajectory with a fit to two collection of hit types, which are convertible to observation circles. | |
| TrackingUtilities::UncertainPerigeeCircle | fitInternal (CDCObservations2D &observations2D) const |
| Internal method doing the heavy work. | |
Private Attributes | |
| bool | m_usePosition |
| Flag indicating the reconstructed position shall be used in the fit. | |
| bool | m_useOrientation |
| Flag indicating the reference position and drift length with right left orientation shall be used in the fit. | |
| EFitVariance | m_fitVariance |
| Default variance to be used in the fit. | |
| bool | m_lineConstrained |
| Memory for the flag indicating that lines should be fitted. | |
Class implementing the fitter using Karimakis method.
Definition at line 23 of file CDCKarimakiFitter.h.
|
inherited |
Fits a collection of observation drift circles.
Definition at line 49 of file CDCFitter2D.icc.h.
|
inherited |
Fits a collection of observation drift circles.
Definition at line 46 of file CDCFitter2D.icc.h.
|
inherited |
Fits to the wire positions. Explicit specialisation to be used from python.
Definition at line 74 of file CDCFitter2D.icc.h.
|
inherited |
Fits to the wire hit observations.
Definition at line 71 of file CDCFitter2D.icc.h.
|
inherited |
Fits to the two segments.
Definition at line 64 of file CDCFitter2D.icc.h.
|
inherited |
Fits the segment.
Definition at line 68 of file CDCFitter2D.icc.h.
|
inherited |
Fits the segment.
Definition at line 61 of file CDCFitter2D.icc.h.
|
inherited |
Fits the track.
Definition at line 58 of file CDCFitter2D.icc.h.
|
inherited |
Fits to the wire positions. Explicit specialisation to be used from python.
Definition at line 77 of file CDCFitter2D.icc.h.
|
privateinherited |
Fits a collection of hit typs which are convertible to observation circles.
Definition at line 88 of file CDCFitter2D.icc.h.
|
privateinherited |
Fits together two collections of hit types which are convertible to observation circles.
Definition at line 92 of file CDCFitter2D.icc.h.
|
privateinherited |
Internal method doing the heavy work.
Definition at line 216 of file KarimakisMethod.cc.
|
static |
Static getter for a general fitter instance with Karimakis method.
Definition at line 20 of file CDCKarimakiFitter.cc.
|
static |
Static getter for a line fitter.
Definition at line 26 of file CDCKarimakiFitter.cc.
|
static |
Static getter for a general fitter that does not use the drift length variances.
Definition at line 33 of file CDCKarimakiFitter.cc.
|
inlineinherited |
Getter for the indicator that lines should be fitted by this fitter.
Definition at line 38 of file KarimakisMethod.h.
|
inherited |
Setup the fitter to use the given variance measure by default.
Definition at line 124 of file CDCFitter2D.icc.h.
|
inlineinherited |
Indicator if this fitter is setup to fit lines.
Definition at line 44 of file KarimakisMethod.h.
|
inherited |
Update the trajectory with a fit to the observations.
Definition at line 55 of file CDCFitter2D.icc.h.
|
inherited |
Update the trajectory with a fit to the observations.
Definition at line 52 of file CDCFitter2D.icc.h.
|
inherited |
Updates the given trajectory inplace from the given segment pair.
Definition at line 83 of file CDCFitter2D.icc.h.
|
inherited |
Updates the given trajectory inplace from the given segment.
Definition at line 80 of file CDCFitter2D.icc.h.
|
inherited |
Executes the fit and updates the trajectory parameters. This may render the information in the observation object.
Definition at line 31 of file KarimakisMethod.cc.
|
privateinherited |
Updates a given trajectory with a fit to a collection of hits types, which are convertible to observation circles.
Definition at line 99 of file CDCFitter2D.icc.h.
|
privateinherited |
Updates a given trajectory with a fit to two collection of hit types, which are convertible to observation circles.
Definition at line 106 of file CDCFitter2D.icc.h.
|
inherited |
Setup the fitter to use only reference position and the drift length with right left orientation.
Definition at line 118 of file CDCFitter2D.icc.h.
|
inherited |
Setup the fitter to use only the reconstructed positions of the hits.
Definition at line 115 of file CDCFitter2D.icc.h.
|
inherited |
Setup the fitter to use both the reconstructed position and the reference position and the drift length with right left orientation.
Definition at line 121 of file CDCFitter2D.icc.h.
|
privateinherited |
Default variance to be used in the fit.
Definition at line 134 of file CDCFitter2D.h.
|
privateinherited |
Memory for the flag indicating that lines should be fitted.
Definition at line 51 of file KarimakisMethod.h.
|
privateinherited |
Flag indicating the reference position and drift length with right left orientation shall be used in the fit.
Definition at line 131 of file CDCFitter2D.h.
|
privateinherited |
Flag indicating the reconstructed position shall be used in the fit.
Definition at line 128 of file CDCFitter2D.h.